Xplore

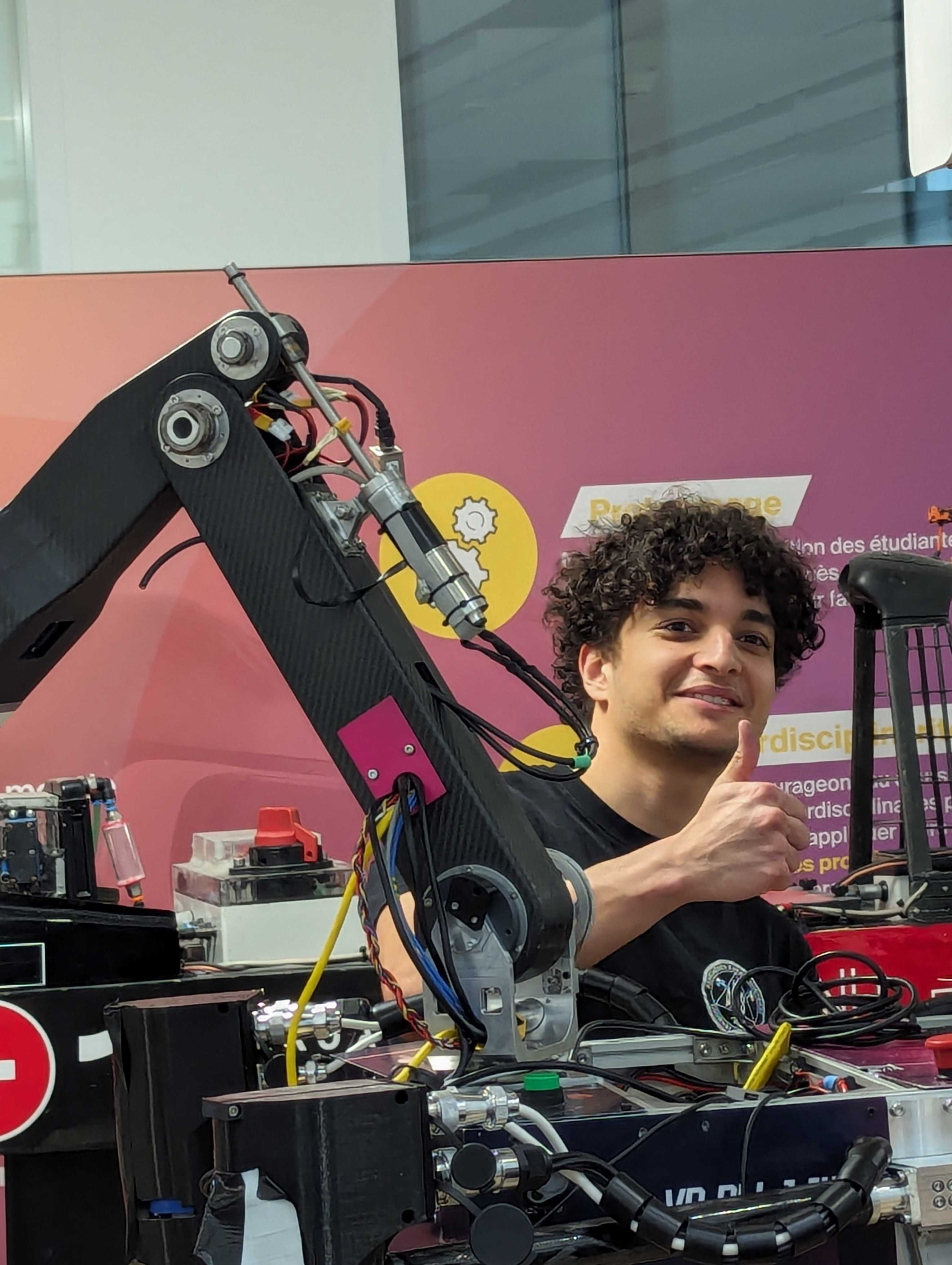
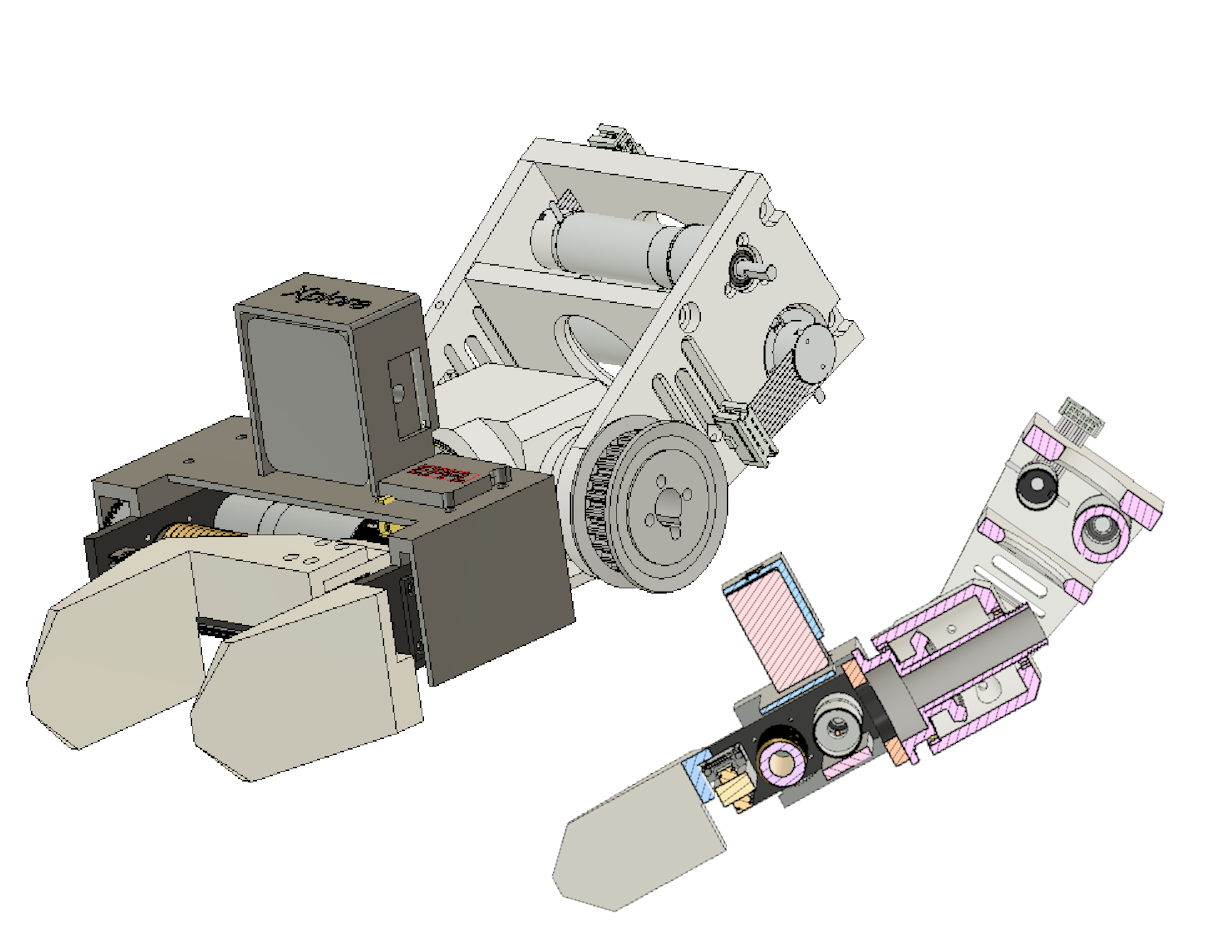
Design of robotic wrist and gripper, 2022
What I did
- Designed and prototyped a robotic wrist using differential belts
- Engineered a custom gripper with a "two way screw" mechanism for long stroke
What I learned
- Fusion360 proficiency, 3D printing
- Technical drawings, tolerances and norms
Outcome
- Working end effector, always grabing objects and hands at events :D
- 3rd place at the European Rover Challenge, and best manipulation award 🏆(certificate here) !

 />
/>

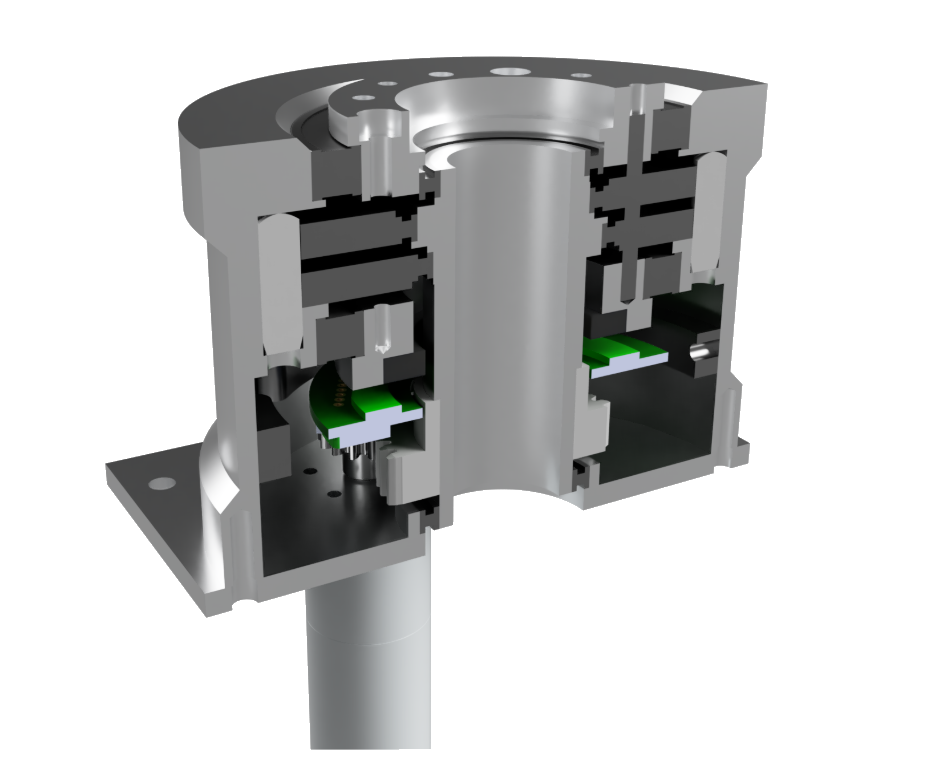
Design and manufacturing of a robotic joint, 2023
What I did
- Extensive litterature review of actuators and drives
- Design and manufacturing of a custom cycloidal drive for low backlash
- Design and manufacturing of a universal hollow robotic joint; integratting motor, drive and encoders
What I learned
- Solidworks and Inventor (some features were not in other softwares)
- Extensive knowledge on motors, drives, actuation types, encoders, controlers...
- Technical drawings respecting industrial standards
Outcome
- A robotic joint that is still used at Xplore because of its accuracy (sub mm), strenght, modularity and ease of use! 💪
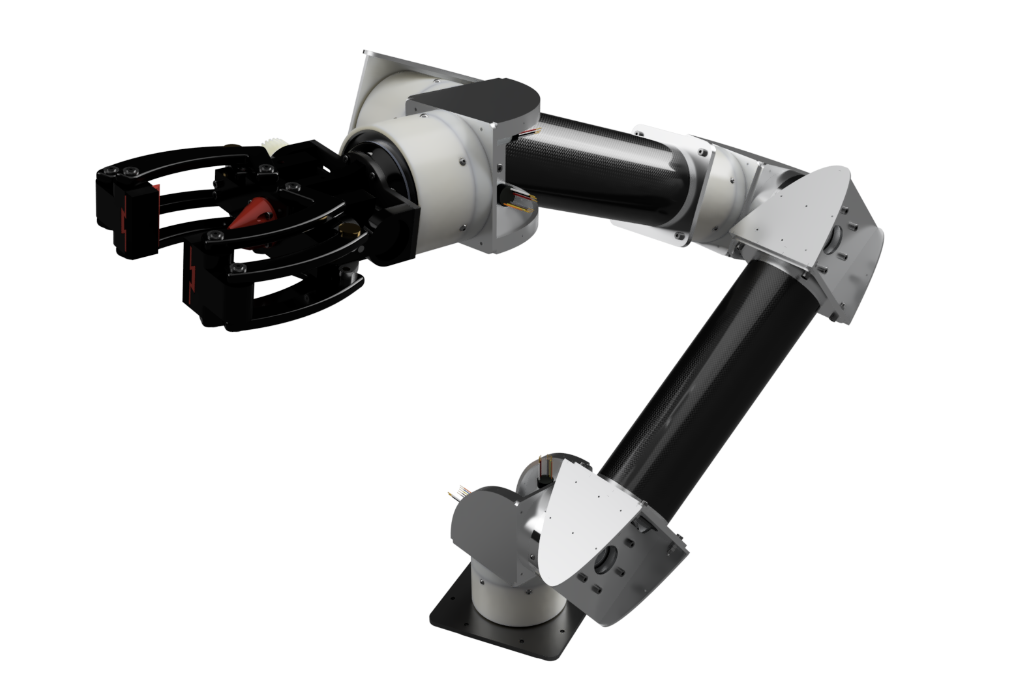
Design, manufacturing, assembly of a 6DOF robotic arm, 2024
What I did
- Managed a team of students to build a 6DOF robotic arm.
- Corrected all the parts and made them in a mechanical workshop.
- Assembled the arm and characterized it.
What I learned
- Team work, time management, budget managemnt, system engineering.
- Manufacturing: turning, milling, CNC, bending, soldering (TIG), SLA printing, crimping (cables, connectos), carbon fiber manufacturing
- Simulation: Abaqus and Ansys
Outcome
- A fully custom 6DOF arm that is still used at Xplore 🤩


Control and Inverse Kinematics, 2024
What I did
- Tuned all robotic joints in velocity and position; implemented a dual loop and feed-forward in position.
- Implemented Inverse kinematics for our specific arm architecture.
- Played with torque sensor outputs to create a compliant/transparent mode.
What I learned
- Applied control theory and Inverse Kinematics that I studied in class.
- Learned ROS2 (Humble), MoveIt and Rviz.
- Applied C++ and Python.
Outcome
- The arm was working well at the competition! (certificate here)
- It is still used everyday at Xplore and the team tries to impove the software.
- We tested features like compliant mode, but so much things are left to explore!


Spacecraft Team
Custom PCB for a CanSat, 2021
What I did
- With 3 friends, we engineered a little payload that was launched in a 2 meter size rocket.
- I was in charge of the electronics, so I designed the PCB.
What I learned
- Kicad, PCB design, Arduino, ESP32, STM32, sensors
- Aerodynamics, recovery systems, flight control
- Teamwork! Collaboration with other association (the RocketTeam)
Outcome
- Successful flight: CanSat launched, ejected, fins deployed, parachute deployed, landed where we launched it 🚀!!!


Onboard Computer for CubeSat, 2022
What I did
- I was one of the member working on the onboard computer we sent in Space.
- Integrated code to control power distribution within the OBC.
What I learned
- Power mangement, embeded systems, low level code.
- Space-grade electronics and protocols.
Outcome
- The board was succesfuly sent in Space and we are receiving data!


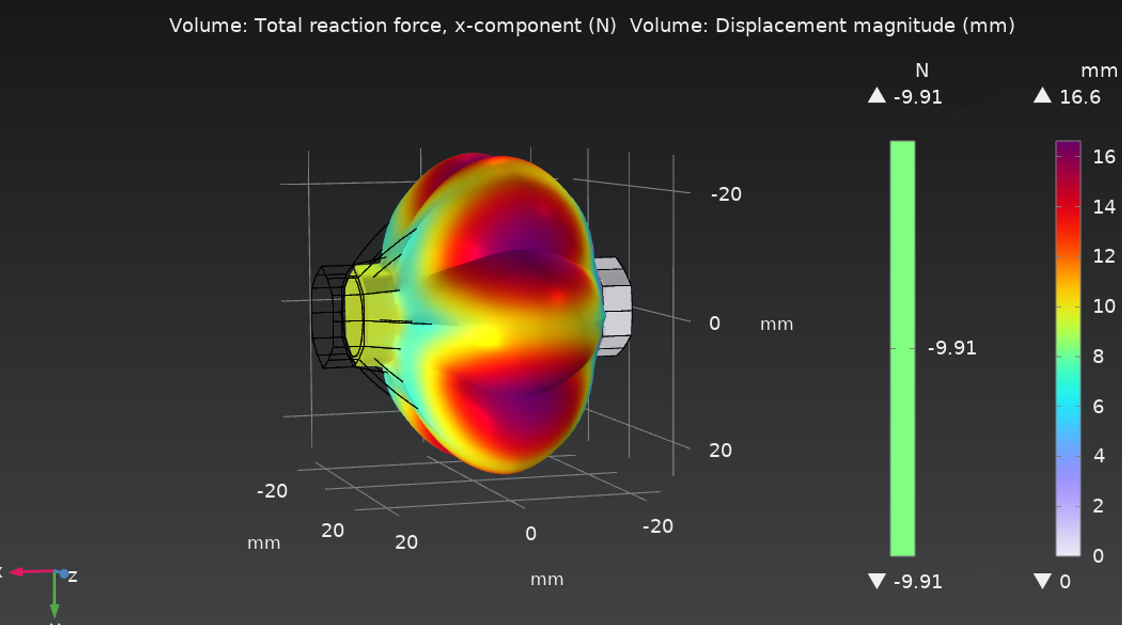
Design, Manufacturing and Optimization of an edible soft pneumatic artificial muscle, 2024
What I did
- Tried different geometries using optimization to maximize output force of an soft pneumatic actuator
- Tried lot of different mixtures of chemicals to improve the actuator's performances while being bio-compatible
- Characterized the actuator with motion capture, isobaric and isometric tests
What I learned
- Expertise in simulations with Comsol and Ansys: non linear and hyperelastic mechanics, fluids, thermodynamics, chemical reactions...
- Matlab and optimization toolboxes
- Soft robotics: bio-compatible materials, silicon manufacturing, advanced molding, chemistry
- writing publication for high impact conferences
Outcome
- The final actuator demonstrated a significant progress, with its characteristics improving by a factor of 40 compared to the initial version.
- Publication in IROS pending!
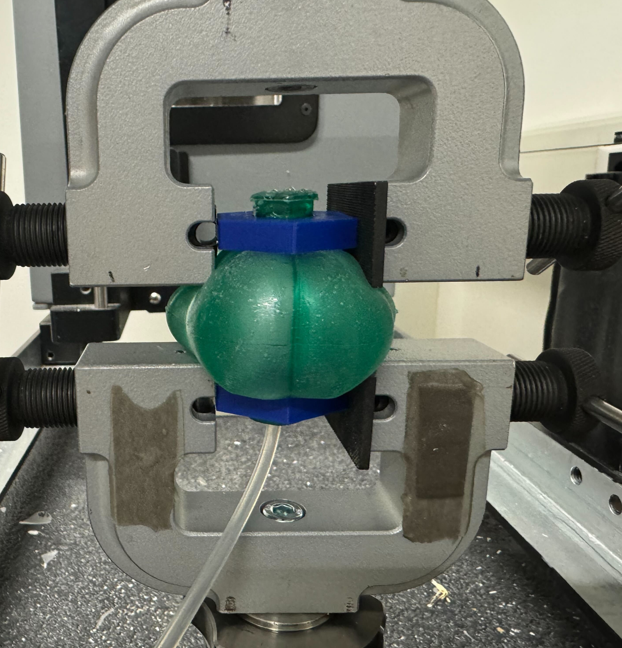
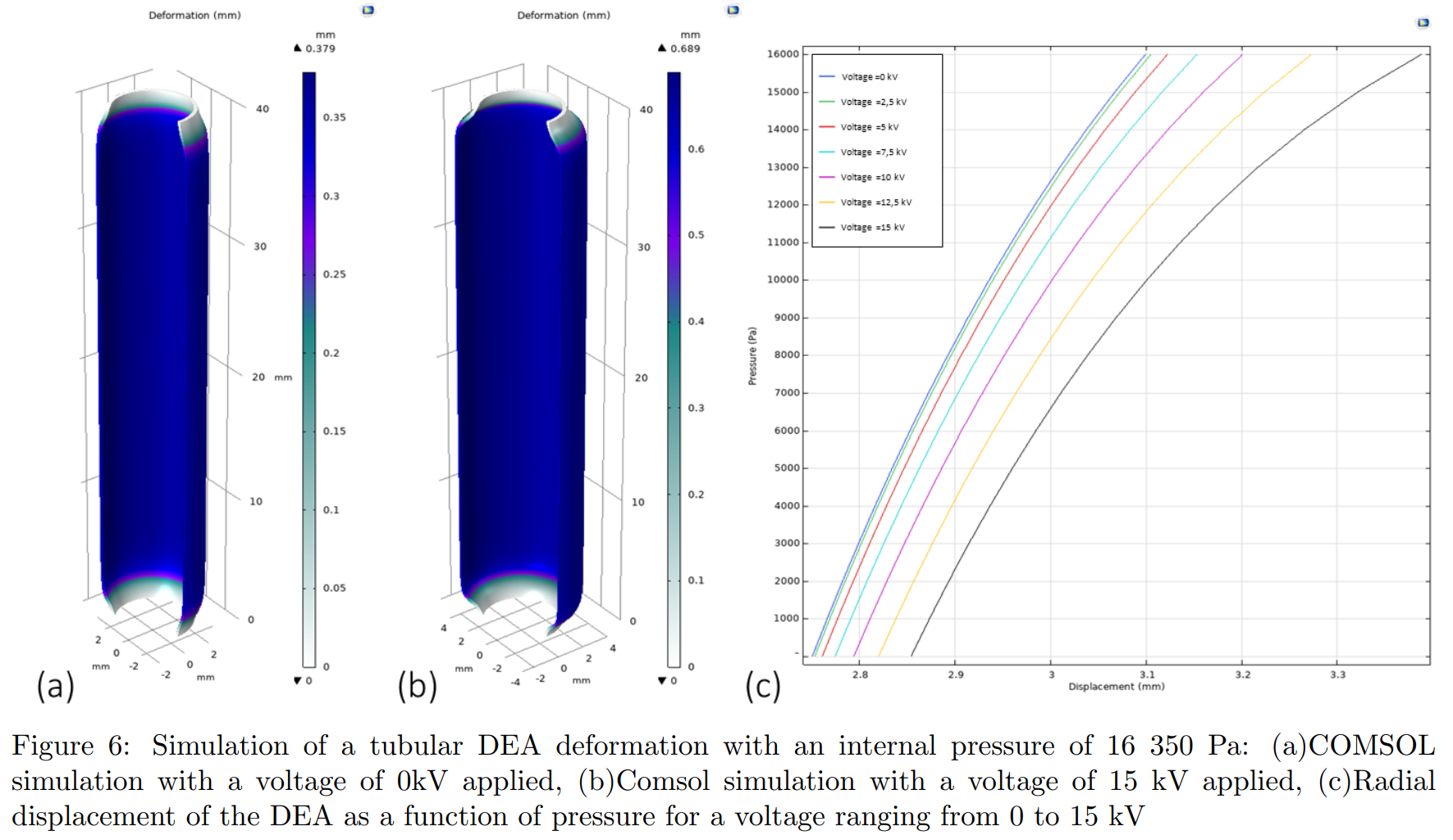
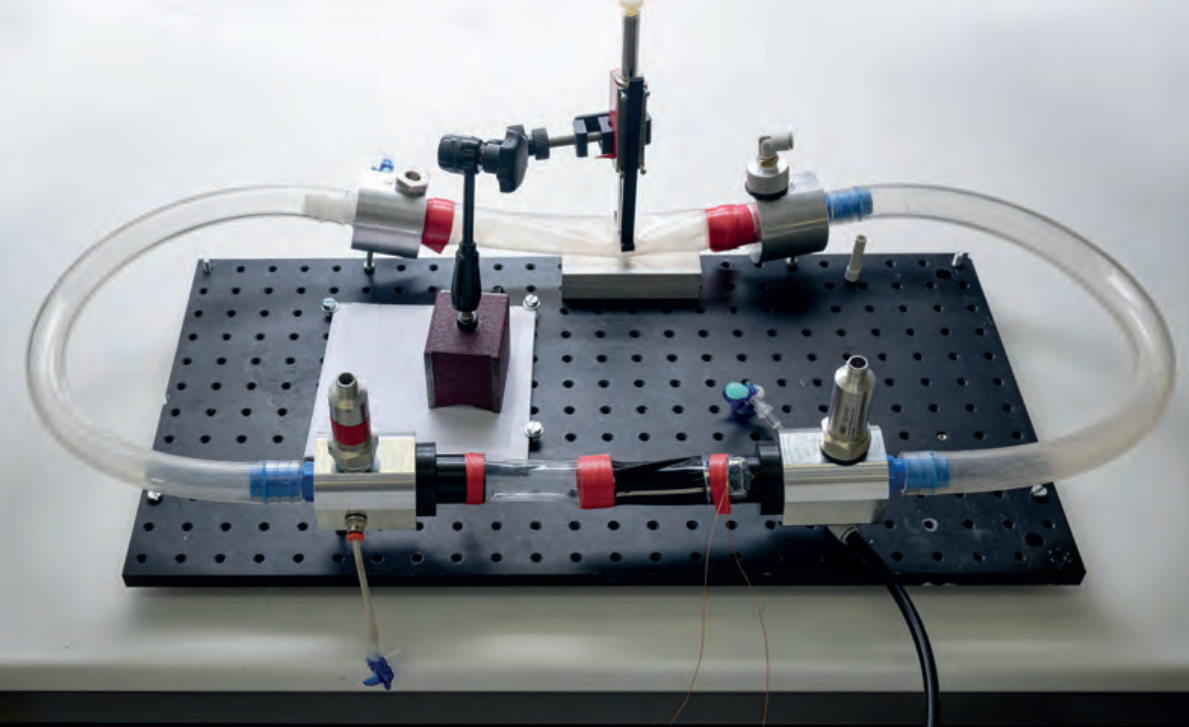
Optimization and Manufacturing of a dielectric elastomer artificial muscle, 2023
What I did
- Optimized a pre-existing dielectric elastromer technology to be applicable for medical uses
- Manufactured prototypes in cleanroom
What I learned
- Multiphysics simulations on Comsol: non-linear mechanics, fluids, electromagnetics, electrostatics...
- Cleanroom manufacturing and protocols
- A lot of knowledge on the human body and about medical standards and norms
Outcome
- Unofrtunately I showed that the dielectric elastomer technology was not performant enough (yet) for their application
- (They stopped the project...)
- We did a publication in a conference about this work (publication here)

Drone integration in a wildfire monitoring system, 2024
What I did
- Learned DJI SDK and the software "Pantera" of the startup (their website here)
- Used ROS + Gazebo to create a simulation of drone missions to take footage of wildfire
- Deployed little proof of concept offline on DJI hardware
What I learned
- Experience with ROS, Gazebo, Linux, FastAPI
- Experience with drone devellopment and DJI hardware
- Work with different teams, sometimes remotely
- C# and windows application (sdk) devellopment
Outcome
- Proved that DJI Mavic drones were easily integrable with the startup eco-system "Pantera"
- Really progressed in Portuguese!


(Note: The start-up does not want me to use content that is not already on the web, sorry)
I like music and specialy to play the piano!

I like running!


I like participating in hackathons!



I like karate!
I don't have cool pictures yet despite my 15 years of practice